Spretni robot sa četiri noge može da hoda i barata predmetima simultano (VIDEO)
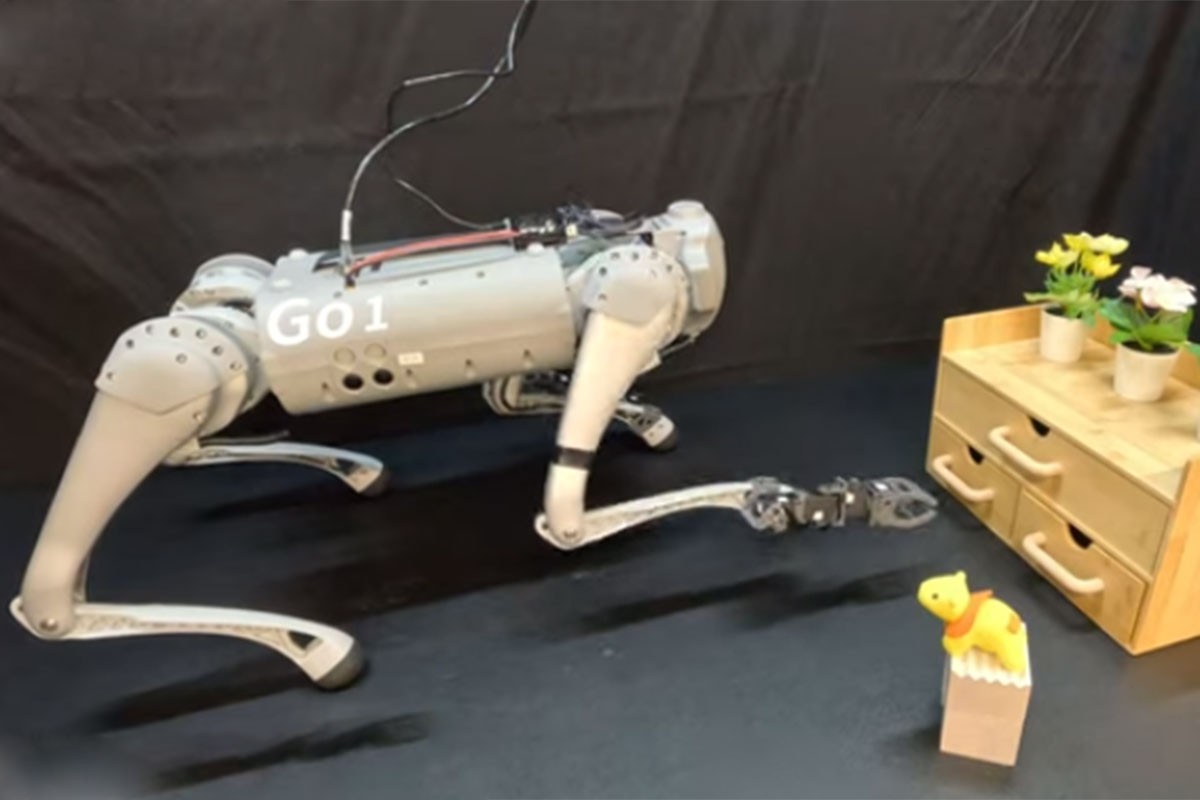 Foto: Screenshot/YouTube
Foto: Screenshot/YouTube
Četvoronožni ili kvadrupedni roboti imaju korisne karakteristike, uključujući sposobnost brzog hoda na nezgodnim terenima i održanje niskog centra gravitacije.
Neki roboti sa četiri noge mogu i da barataju predmetima u svom okruženju, a to se obično postiže pomoću struktura nalik ruci postavljenim na vrh robota, umjesto udovima koji se koriste za hodanje.
Istraživači sa Univerziteta Karnegi Melon, Vašingtonskog univerziteta i iz Gugla su nedavno razvili inovativnog kvadrupednog robota koji može da barata obližnjim predmetima pomoću nogu koje koristi za hodanje. Ovaj robotski sistem se pokazao kao vrlo spretan i višestran, uspješno obavljajući širok spektar zadataka, piše TechXplore, a prenosi Telegraf.
Kvadrupedni roboti su višestrani instrumenti sposobni za kretanje i operacije u složenim sredinama.
Tradicionalni dizajni obično uključuju ruke postavljene na vrh radi funkcija manipulacije.
Međutim , takve konfiguracije mogu da ograniče nosivost, stabilnost i efikasnost robota.
U prirodi ne vidimo psa sa rukom na leđima, kaže profesor Ding Džao iz Laboratorije za AI Univerziteta Karnegi Melon.
Novi robot, Lokomen, ima specijalnu morfologiju koja mu omogućava prilagođavanje aranžmana udova tako da može da barata predmetima na različite načine.
Bitna komponenta je lokomanipulator, novorazvijeni, prilagodljivi, jeftini i modularni manipulator sa 3-DoF. Lokomanipulator je prilično lako proizvesti i stoga bi mogao biti naširoko primijenjen. Istraživači su inkorporirali dva lokomanipulatora na prednje potkolenice robota, omogućavajući da takođe funkcionišu kao ruke.
Osim što nije skup i što je kompaktan, Lokomen može da obavlja zadatke složenog baratanja predmetima, uključujući otvaranje vrata, uključivanje električnih uređaja u utičnicu i hvatanje predmeta u malim prostorima.
Naučnici planiraju da unaprijede sposobnosti robota pomoću najrazvijenijeg kompjuterskog vida i algoritama mašinskog učenja. Integracija vizuelno-jezičkih modela će bitno izmijeniti način na koji Lokomen izvodi akcije.
To bi moglo biti postignuto interpretacijom vizuelne percepcije okruženja i procesuiranjem verbalnih instrukcija dobijenih od ljudi, omogućavajući intuitivniju i savršeniju interakciju, kaže Džao.
(Nezavisne)
Neki roboti sa četiri noge mogu i da barataju predmetima u svom okruženju, a to se obično postiže pomoću struktura nalik ruci postavljenim na vrh robota, umjesto udovima koji se koriste za hodanje.
Istraživači sa Univerziteta Karnegi Melon, Vašingtonskog univerziteta i iz Gugla su nedavno razvili inovativnog kvadrupednog robota koji može da barata obližnjim predmetima pomoću nogu koje koristi za hodanje. Ovaj robotski sistem se pokazao kao vrlo spretan i višestran, uspješno obavljajući širok spektar zadataka, piše TechXplore, a prenosi Telegraf.
Kvadrupedni roboti su višestrani instrumenti sposobni za kretanje i operacije u složenim sredinama.
Tradicionalni dizajni obično uključuju ruke postavljene na vrh radi funkcija manipulacije.
Međutim , takve konfiguracije mogu da ograniče nosivost, stabilnost i efikasnost robota.
U prirodi ne vidimo psa sa rukom na leđima, kaže profesor Ding Džao iz Laboratorije za AI Univerziteta Karnegi Melon.
Novi robot, Lokomen, ima specijalnu morfologiju koja mu omogućava prilagođavanje aranžmana udova tako da može da barata predmetima na različite načine.
Bitna komponenta je lokomanipulator, novorazvijeni, prilagodljivi, jeftini i modularni manipulator sa 3-DoF. Lokomanipulator je prilično lako proizvesti i stoga bi mogao biti naširoko primijenjen. Istraživači su inkorporirali dva lokomanipulatora na prednje potkolenice robota, omogućavajući da takođe funkcionišu kao ruke.
Osim što nije skup i što je kompaktan, Lokomen može da obavlja zadatke složenog baratanja predmetima, uključujući otvaranje vrata, uključivanje električnih uređaja u utičnicu i hvatanje predmeta u malim prostorima.
Naučnici planiraju da unaprijede sposobnosti robota pomoću najrazvijenijeg kompjuterskog vida i algoritama mašinskog učenja. Integracija vizuelno-jezičkih modela će bitno izmijeniti način na koji Lokomen izvodi akcije.
To bi moglo biti postignuto interpretacijom vizuelne percepcije okruženja i procesuiranjem verbalnih instrukcija dobijenih od ljudi, omogućavajući intuitivniju i savršeniju interakciju, kaže Džao.
(Nezavisne)